在工业机器视觉技术中,要实现精确的图像捕捉,需全面考量光学设计、参数协调以及环境调控。以下是实现这一目标的关键步骤与技术要点:
1. 镜头选择与匹配
应用需求分析:针对具体的应用场景,明确所需的图像精度、视场范围以及分辨率。
精度要求:对于高精度测量,应选用能够消除透视畸变的远心镜头;而对于常规检测,FA镜头则更为适用。
视场(FOV)与分辨率:根据被测物体的尺寸以及最小检测特征,计算所需的分辨率(例如:像素精度等于特征尺寸除以2)。
传感器匹配:确保镜头的分辨率(MTF曲线)与相机的像元尺寸相匹配(例如:若相机具有2μm的像元尺寸,则镜头需支持120线对/mm以上的分辨率)。
焦距计算:可利用以下公式进行计算:
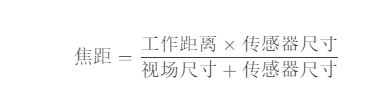
例如:在检测10厘米的物体时,若工作距离为30厘米,并采用1英寸(即16毫米)的传感器,那么所需的焦距大约为4.8毫米。
2.光学参数的优化
光圈控制:
景深优化:采用较小的光圈(即较大的F值)可以增加景深,但同时需要考虑光线的平衡(公式:景深与F值的平方成正比,与工作距离的平方成反比,与焦距的平方成反比)。
衍射极限:需避免光圈过小导致的衍射模糊,其临界F值大约等于像元尺寸的两倍。
畸变校正:

1. 提取畸变系数\(k_1, k_2\)的方法
采用标定板(如棋盘格)进行畸变系数的提取。
2. 机械安装与校准
光轴对齐:
确保镜头的光轴与相机传感器平面垂直(偏差小于0.1°),以减少梯形畸变的发生。
使用千分表对安装法兰的平行度进行校准。
调焦技术:
采用对比度峰值法,实时监测图像梯度,调整焦距以实现最大对比度。
激光测距辅助:
在需要高精度场景时,使用激光测距仪来标定工作距离。
3. 环境控制
抗振动:
若曝光时间小于1ms,可抑制机械振动引起的模糊(需配合高亮度光源)。
使用气浮隔振台(振动衰减频率大于50Hz)来减少振动。
温漂补偿:
镜头的热膨胀系数:每摄氏度变化可能导致焦距偏移0.02%-0.05%。
采用恒温环境(温度波动±1℃)或选择低热膨胀材料(如Invar合金)的镜头。
4. 后期处理与标定
图像增强:
利用频域滤波技术,特别是Wiener滤波,来校正光学像差。
通过HDR融合(多曝光合成)技术,提升图像的动态范围。
系统标定:
使用高精度标定板(如陶瓷材质,误差小于1μm),并通过最小二乘法拟合相机的内外参数。
建议定期进行系统标定,如每月一次,或在环境变化后进行。
5. 典型应用案例
PCB检测:
使用配备5MP相机和0.5X远心镜头的设备,工作距离为200mm,光圈为F8,用于检测0.1mm的焊点。
精密测量:
采用双远心镜头和蓝光LED光源(以降低色差),实现亚微米级的重复精度。
通过以上步骤,可以全面提升工业镜头的成像精度,满足微米级检测的需求。在实际应用中,应根据具体场景不断调整和优化相关参数。
版权所有:大林机器视觉培训所有 备案号:苏ICP备14016686号-9
本站关键词:上位机培训 机器视觉软件开发培训 上位机运动控制培训 深度学习培训 网站标签




