如何用C语言在Linux下给cc2530实现一个简单的上位机(上)
环境简介
1. 软硬件环境
下位机:CC2530 OS:vmware + ubuntu
在这里彭老师采用的是CC2530,读者也可以采用其他的板子,我们只需要该板子有串口,可以和PC通信,同时板子上有可设置的led灯、继电器以及可以采集数据的传感器即可。
2. 硬件连接图
硬件连接图如下:
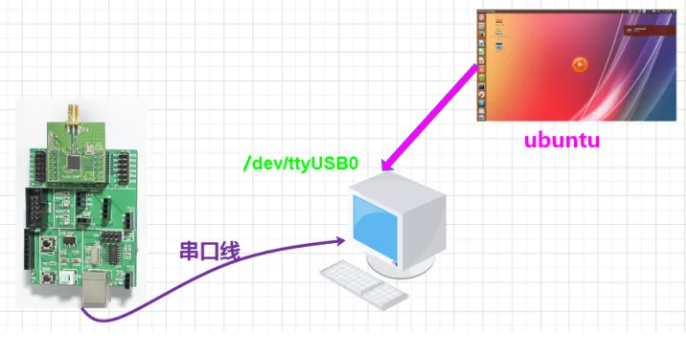
该款CC2530已经集成了CH340芯片,usb线连接电脑,即可被识别。
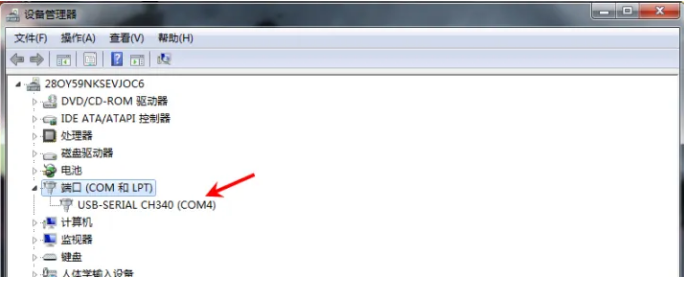
3. pc下识别串口
如果该串口被PC获取,名字为COMn【n为某整数】。
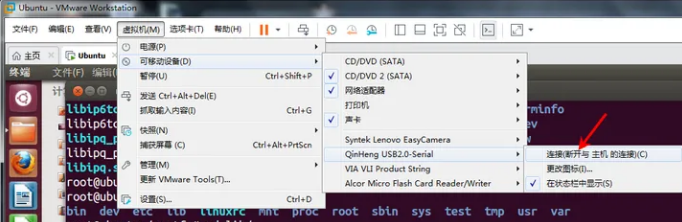
4. ubuntu下识别串口
首先需要vmware抓取串口【串口在同一时刻要么被windows抓取要么被vmware抓取】,按下图所示,点击连接即可:
但是往往ubuntu中没有ch340的驱动,经过实际测试,ubuntu14及之前的版本都没有这个驱动,ubuntu16以上的版本有这个驱动。
如果没有ch340驱动可以用以下方法安装对应的驱动:
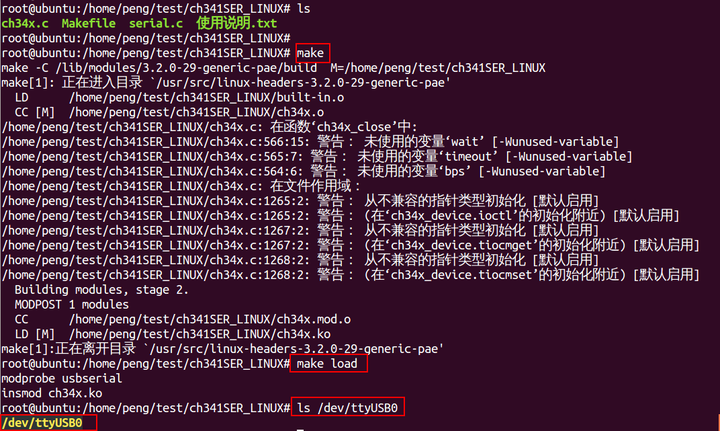
1 make
2 sudo make load
3 ls /dev/ttyUSB0
按照上述步骤,会生成设备文件**/dev/ttyUSB0**。
大林上位机机器视觉,_苏州电工培训_苏州PLC培训_苏州机器视觉培训_苏州上位机培训_苏州工业机器人培训,最适合电工及plc编程人员学习的上位机机器视觉课程 大林老师:15861139266(微信同号)
ls /dev/ttyUSB0 -l
crw-rw---- 1 root dialout 188, 0 Jan 15 05:45 /dev/ttyUSB0
c : 字符设备 rw-rw---- :文件操作权限
188, 0 : 主次设备号
3、4节提到的usb转串口驱动和linux下驱动源码后台【GH】回复 ch340 即可获得

【注意】 如果是其他开发板,自行安装其他的串口驱动。
二、模块设计
上位机和下位机的通信往往都是通过串口,linux下往往生成字符设备ttyUSB0【有的是ttyS0】,操作串口设备就只需要操作该字符设备即可。
下面我们设计上下位机的软件模块。
1. 信令
设计上位机,首先需要设计上位机下发给下位机的指令格式,上位机按照该指令格式发送命令给下位机,下位需严格按照该指令格式进行解析指令。

含义如下:
device:要操作的设备
data :对应的设备及其额外的数据
CRC :校验码
# :信令终止符
信令格式可以根据需要扩展或者精简。
其中device定义如下【可以根据实际情况进行扩展】:
#define DEV_ID_LED_ON 0X1
#define DEV_ID_LED_OFF 0X2
#define DEV_ID_DELAY 0X3
#define DEV_ID_GAS 0X4
【注意】 为便于理解,我们暂不考虑效率问题。
2. 上传数据
下位机需要采集传感器的数据并通过串口上传,数据结构定义如下:
struct data{
unsigned char device;
unsigned char crc;
unsigned short data;
};
device 设备
data 采集的数据
crc 校验码
3. 功能模块
现在就可以开始设计软件的各个功能模块了。
下位机
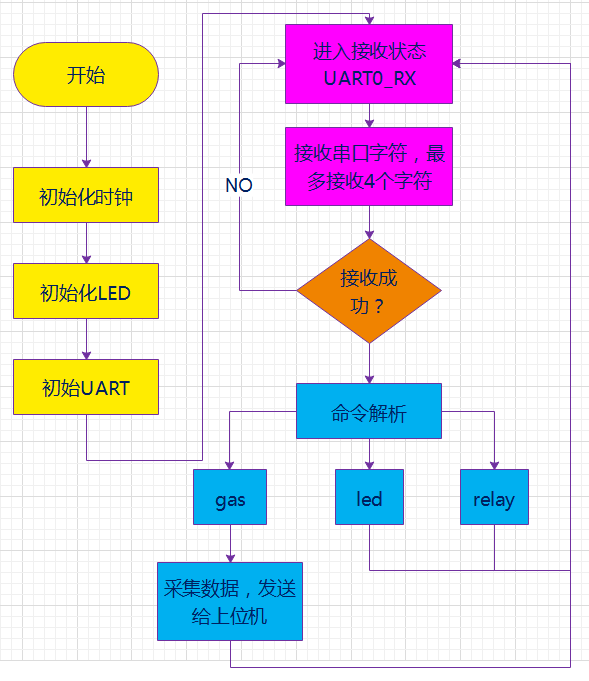
下位主要任务就是循环接收上位机通过串口下发的数据,然后解析该指令内容,操作对应的硬件。
上位机
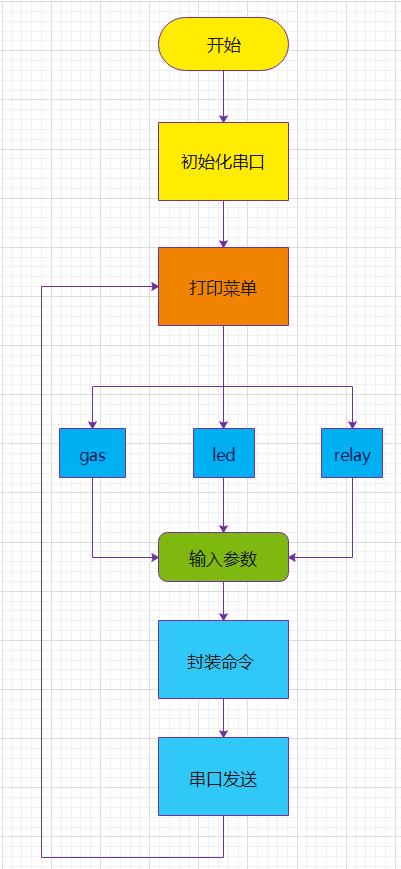
上位机主要任务是打印菜单,由用户针对菜单做出选择,然后按照指令格式封装命令,并通过串口将该命令下发给下位机。
三、 下位机功能函数
cc2530的操作原理,本文不讨论,如果是其他开发板,只需要修改串口操作函数。
1. LED初始化
/****************************************************************************
* 名 称: InitLed()
* 功 能: 设置LED灯相应的IO口
* 入口参数: 无
* 出口参数: 无
****************************************************************************/
void InitLed(void)
{
P1DIR |= 0x01; //P1.0定义为输出口
LED1 = 0;
}
2. 初始化UART
/****************************************************************
* 名 称: InitUart()
* 功 能: 串口初始化函数
* 入口参数: 无
* 出口参数: 无
*****************************************************************/
void InitUart(void)
{
PERCFG = 0x00; //外设控制寄存器 USART 0的IO位置:0为P0口位置1
P0SEL = 0x0c; //P0_2,P0_3用作串口(外设功能)
P2DIR &= ~0xC0; //P0优先作为UART0
U0CSR |= 0x80; //设置为UART方式
U0GCR |= 11;
U0BAUD |= 216; //波特率设为115200
UTX0IF = 0; //UART0 TX中断标志初始置位0
U0CSR |= 0x40; //允许接收
IEN0 |= 0x84; //开总中断允许接收中断
}

版权所有:大林机器视觉培训所有 备案号:苏ICP备14016686号-9
本站关键词:上位机培训 机器视觉软件开发培训 上位机运动控制培训 深度学习培训 网站标签




